
来看看你对牛顿第一定律有多少误解。
很多书上都说:
牛顿第一定律是牛顿力学的基石。
不过那些书的编者对待这块基石的实际态度却很差,根本没把这块基石放在眼里。
他们介绍牛顿第一定律更像是走个过场,并没有诠释清楚其中的内涵。
常见的表述是:
一切物体总保持静止状态或匀速直线运动状态,除非作用在它上面的力迫使它改变这种状态。
但是,这种表述很不严谨,有很多细节都没交待清楚。
容易让人产生一种“我已经知道牛顿第一定律说了些什么”的错觉。
物理学是一门严谨的学问,要用严谨的语言去书写。不得不使用自然语言(汉语、英语、德语、……)去书写时,更要注意其表述的严谨。
(笔者确实有意将上面这种常见的表述作为“反面教材”。)

一定要清楚,牛顿第一定律完全称得上是博大精深。
笔者先给出一个自认为足够严谨的表述:
这两者互为充分必要条件:
1.质点不受外力或所受合外力为零。
2.质点相对于惯性系保持静止或匀速直线运动。
这种表述可谓是字字珠玑,下面将其中的内涵细细道来:
(主要是介绍这种表述中出现的各种概念的定义,以及理解这些概念所需的一些额外的知识。)
什么是“质点”?
很多人介绍牛顿第一定律时,喜欢使用“物体”一词。
从这里开始就已经不严谨了,因为牛顿力学研究的仅仅只是质点的运动!
牛顿运动定律以及万有引力定律都是针对质点提出的定律!
(牛顿力学其实是质点力学。)
而质点是对现实物体的抽象,并且有些物体是不能被抽象成质点的,使用“物体”一词盲目地扩大了牛顿第一定律的研究范围。
质点本身很简单,就是:具有质量的点。
在这里先说清楚,为什么要把现实物体抽象成一个质点?
其实这是为了描述现实物体的平动。
运动可以被简单分为:
平动、转动、振动。
牛顿运动定律仅仅着眼于平动。
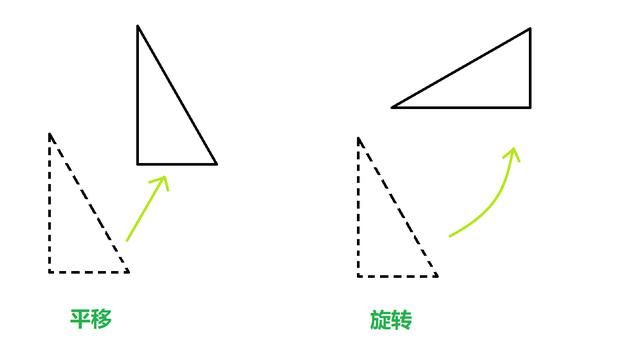
可以借助平面图形的平移和旋转来理解平动和转动。
只不过平动可以在三维空间中发生,转动的转轴可以朝向三维空间的任意方向。
可以认为现实物体是由大量质点组成的,当现实物体平动时,组成它的每个质点的运动轨迹都相同。
所以只要描述了其中一个质点的平动,就相当于描述了整个物体的平动。
此时,就可以把现实物体抽象成一个质点。
听起来好像很简单,不过有时候平动和转动容易被混淆。
平动不只是直线运动,直线运动也未必是平动。
有人会以为这都是转动:
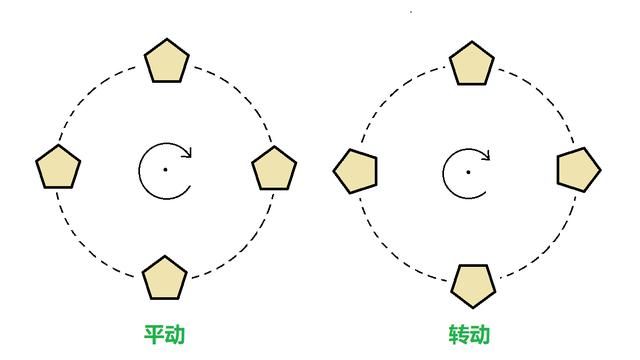
(很多人中学时学得“匀速圆周运动”其实是平动。)
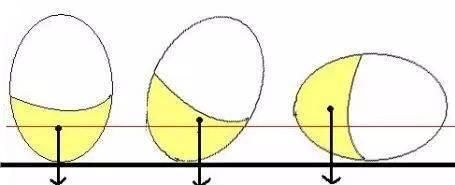
有人会以为这都是平动:

(很多人中学时计算“小球的动能”是按平动算的,这其实是错的。)
那么如何把现实物体抽象成一个质点?
这很简单,质点就两个要素:
质量、位置。
质点的质量就是现实物体的质量,这没什么难度。
有难度的是质点的位置。
上面说过:当现实物体平动时,组成它的每个质点的运动轨迹都相同。
似乎现实物体上的每个位置都可以作为抽象后的质点的位置,事实上这种做法也确实可行。
不过,稳妥的做法是:
把现实物体的质心所在的位置,作为抽象后的质点的位置。
(物体的质心就是重心。)
既然其它位置也可以,为什么要用稳妥的做法?
上面说过,运动可以被简单分为:
平动、转动、振动。
千万别以为这只是在给运动分类!
这其实是一套方法论。
现实物体的运动往往非常复杂,既平动、又转动、还振动。
将这三种运动分开研究,再合并到一起,便是研究现实物体运动的方法。
为了将这三种运动合并到一起,就需要把现实物体的质心所在的位置,作为抽象后的质点的位置。
(很多时候,你理解不了某些问题,只是因为你所处的层次太低。)
什么是“外力”?
(先说清楚,力是由牛顿第二定律定量地定义的,也能由牛顿第一定律定性地定义,此处不再深究其定义。)
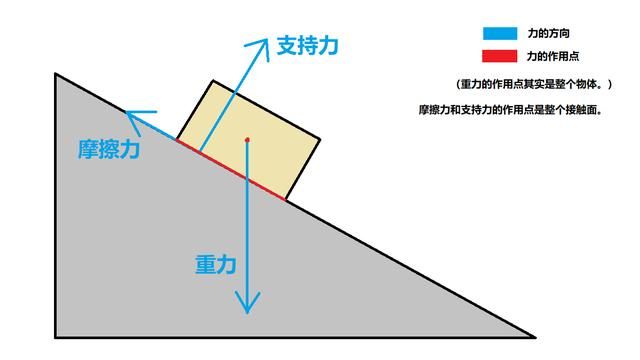
力,有三个要素:
大小、方向、作用点。
很多人都会忽略力的作用点。
(可能是因为很多人都只学过质点力学,把运动的物体都当成了质点,自然不用考虑力的作用点。)
有外力,就意味着也有内力。
一个力是外力还是内力,取决于你选取的系统包括哪些物体。
这是一件很主观的事,系统就像一个圈子,一个人在不在圈子里,要看你说的是哪个圈子。
选取系统非常灵活,可以把不接触的物体看成一个系统,也可以把同一个物体的局部看成一个系统。
(就像一个国家的领土未必要接壤,在一个国家之内还可以划分行省一样。)

外力:系统外的物体对于该系统或它的某一部分所作用的力。
内力:系统内的一部分对另一部分作用的力。
这两句话应该不难理解。
笔者在此补充一点:
区分外力和内力需要对力的作用点非常敏感。
什么是“合外力”?
提及合外力,很多人只说这些:
力可以合成,多个力可以合成一个力。
多个力共同作用的效果和多个力的合力的作用效果相同。
所有的外力的合力就是合外力。
两个力的合成遵循平行四边形法则。
(把两个力的合力再和其它力合成,就求出了多个力的合力。)

(至于力的分解,听起来和力的合成是一对概念,实际上却差得远。力的合成,结果是唯一的;力的分解,结果却不唯一,取决于坐标的选取。所以,介绍力的合成时,没必要介绍力的分解。)
但是,很多人都没说一件大事:
共点力才能合成!
(没错,有些力是不能合成的。)
共点力这个概念出现的突兀吗?
并不突兀,上面的力的合成的说法本身就不完整。
(有时候,仅凭对基本概念和基本逻辑的敏感,就能发现“新大陆”。)
力,有三个要素:
大小、方向、作用点。
上面的力的合成的说法只考虑了力的大小和方向。
作用点呢?
没说。
力的合成其实是共点力的合成。
(这就包含了力的作用点。)
如果多个力的作用线交于同一点,那么这些力就是共点力。
至于作用线,就是与力的方向相同、穿过力的作用点的直线。
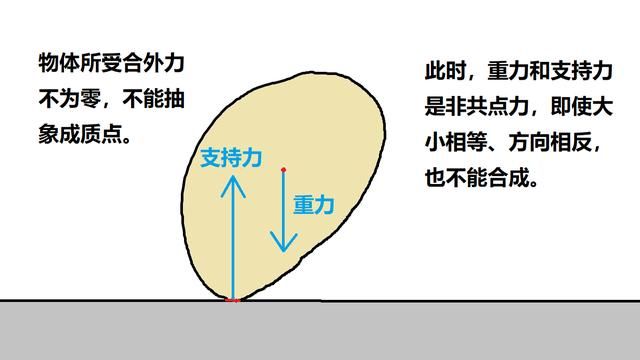
如果多个力的作用线不交于同一点,那么这些力就是非共点力。
非共点力是不能合成的!
(除非它们大小相等、方向相同。)
不仅可以通过物体是否平动来判断是否可以把物体抽象成质点。
还可以通过物体受的力是否是共点力来判断是否可以把物体抽象成质点。
一个是从运动的视角入手,一个是从受力的视角入手。
这两种方法其实是一样的,非共点力会产生力矩,使物体旋转、弯曲、扭曲、……,不会让物体平动。
(力的合成都是为质点服务的,有没有再次感受到牛顿力学是质点力学?)
什么是“相对”?
静止是相对的,运动也是相对的。
(当然,如果不定量描述运动的话,也可以说运动是绝对的。)
谈及静止和运动,都要说清楚是相对于谁静止、相对于谁运动。
地球表面不是真的静止,它在绕着地心转动;地心不是真的静止,它在绕着太阳转动;太阳不是真的静止,它在绕着银河系中心转动;银河系中心不是真的静止,它在向其它星系运动、……

绝对的静止是不存在的,我坐在开着的公交车上的时候,也可以说公交车是静止的。
没有所谓的“日心说”推翻“地心说”这回事,只有参考系脱颖而出。
谈及静止和运动,都要说清楚是相对于哪个参考系静止、相对于哪个参考系运动。

确定参考系,首先要确定参考点,参考点就是选取的相对静止的点。
(变换一个参考系,物体的运动可能会天差地别。)
这个相对静止的点总要落到具体的物体上。
不过,很多人都会忽略一件事:
确定了参考点,并不代表确定了参考系!
用同一个参考点可以建立无数个参考系!
因为参考系实际上是个坐标系,参考点是坐标原点。
当坐标原点不变时,坐标系可以绕着坐标原点以任意的角速度旋转。
这就会形成无数个参考系!

什么是“匀速直线运动”?
匀速直线运动,这种说法其实有些赘余。
其实速度是矢量,有大小也有方向,“匀速”就已经有“直线运动”的意思了。
不过,考虑到“匀速”可能有多种定义,笔者仍然使用“匀速直线运动”这种说法。
为此单独开辟一个小标题,是因为“匀速直线运动”是最接近“静止”的一种运动。
或者说,“匀速直线运动”就是“静止”,“静止”就是“匀速直线运动”。
(静止,不过是速度大小为零的匀速直线运动。)
静止是可以“传递”的。
如果参考系A相对于参考系B静止,参考系A也相对于参考系C静止。
那么参考系B和参考系C也相对于对方静止。
匀速直线运动也是可以“传递”的。
如果参考系A相对于参考系B做匀速直线运动,参考系A也相对于参考系C做匀速直线运动。
那么参考系B和参考系C也相对于对方做匀速直线运动。
(除此以外,没有任何一种运动具有这个特征。)
这意味着,相互之间做匀速直线运动的参考系是“平等”的。
这是一种和谐之美!
什么是“保持”?
“质点相对于惯性系保持静止或匀速直线运动”。
很多人都没把“保持”这个词放在眼里。
“保持”,是惯性的第一个特征。
(惯性的另一个特征会在下面强调。)
“惯性”其实就是“惰性”,就是“懒”。
不过,如果你对惯性的认知就只有一个“懒”字的话,那就太肤浅了。
也有很多人会说:质量是惯性的量度。
这听起来深刻了一些。
不过,如果你觉得惯性的量度就是质量,质量是一个了不得的物理量的话,那也很肤浅。
关于“惯性”和“惯性的量度”,这里面的物理太深奥了,没有上万字是说不明白的。
笔者仅仅希望读者能从“不知道自己不知道”达到“知道自己不知道”。
下面仅泛泛而谈:
惯性其实是“能量不突变”的体现,“速度不突变”仅仅只是因为速度可以表征能量。
(“能量不突变”是一种信仰,理解这种信仰,才能理解当初的普朗克为什么要拼命扼杀“能量量子化”。)
一切能反应“能量不突变”的性质,都是惯性。
大部分人都只知道“机械惯性”,但实际上还有“电磁惯性”、“热惯性”、……
正因如此,质量并不等价于惯性的量度。
(具体内容必须涉及到微积分和微分方程的知识,笔者在这里不便多说。)
什么是“惯性系”?
(先说清楚,惯性系是通过牛顿第一定律定义的,相互之间做匀速直线运动的参考系都是惯性系,惯性系都是“平等”的。)
很多人介绍牛顿第一定律,只说“保持静止或匀速直线运动”。
从不强调“相对于惯性系保持静止或匀速直线运动”。
很多人也说牛顿第一定律也叫惯性定律,引出了惯性系的概念才是其重要意义。
但是他们表达的牛顿第一定律里却没出现过惯性系这个词。
让惯性系出场的时候,他们会补充一句:牛顿运动定律适用的参考系就是惯性系。
面对这些表达,笔者实在是有些不忍直视。
当然,他们这么说也没问题,只是思想深度差了一大截,把一个环环相扣的严密体系表达成了东拼西凑的“豆腐渣工程”。
强调“相对于惯性系保持静止或匀速直线运动”,究竟有什么用?
除了更好地整合各种基本概念之外,还有至关重要的一点:
可以自然而然地引出“惯性力”的概念!
(先别急着抬杠。)
这种想法很自然:
在惯性系里静止或做匀速直线运动的质点,在非惯性系里会怎么样?
不会静止,也不会做匀速直线运动,就像有不为零的合外力作用于质点一样。
这其实是质点的惯性的体现,被形象地称为“惯性力”。
切记,“惯性力”只存在于非惯性系中。
惯性,就是相对于惯性系保持静止做匀速直线运动。
只认惯性系,不认非惯性系。
这是惯性的第二个特征。
多说一句,“惯性力”不是力,但不能说没有“惯性力”。
(至于“惯性力”为什么不是力,是由于力的作用是相互的,“惯性力”只有受力物体,没有施力物体。)
因为“惯性力”其实就是惯性,说没有“惯性力”就是在说:
没有惯性。
有点像:蜗牛不是牛,但不能说没有蜗牛、壁虎不是虎,但不能说没有壁虎、熊猫不是猫,但不能说没有熊猫、……
什么是“充分必要条件”?
这可能是个题外话,但也是理解一切物理学和数学定理的关键一步。
这涉及到,牛顿第一定律究竟有几种表述方式?
关键之处在于:
区分“充分条件”和“必要条件”。
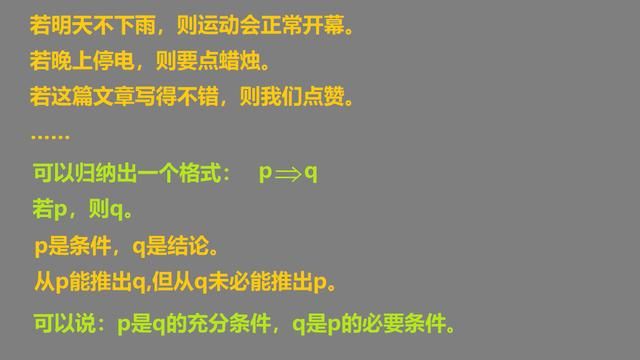
如果既能从p推出q,也能从q推出p;那么p就是q的充分必要条件,q也是p的充分必要条件。
也可以说p和q互为充分必要条件。
(充分必要条件也可以简称为:充要条件。)
所以说,牛顿第一定律至少有两种表述:
第一种表述:
若质点不受外力或所受合外力为零,则质点相对于惯性系保持静止或匀速直线运动。
第二种表述:
若质点相对于惯性系保持静止或匀速直线运动,则质点不受外力或所受合外力为零。
这还没完,“若p则q”这种格式的句子其实是个命题。
也就是说,牛顿第一定律其实是个命题。
每一个命题都伴随着三个其他的命题:
逆命题:“若q则p”
否命题:“若非p则非q”
逆否命题:“若非q则非p”
大家应该可以看出,上面那两种“若p则q”格式的牛顿第一定律的表述,互为逆命题。
命题有真假之分,并且一个命题的真假与它的逆否命题的真假是一致的。
(顺便第一句,逆命题和否命题互为逆否命题,它们的真假也是一致的。)
因此又可以多出两种表述:
第三种表述:
若质点所受合外力不为零,则质点不会相对于惯性系保持静止或匀速直线运动。
第四种表述:
若质点不相对于惯性系保持静止或匀速直线运动,则质点所受合外力不为零。
这部分的内容是想说:牛顿第一定律至少有四种表述。
写在最后
重温一下牛顿第一定律:
这两者互为充分必要条件:
1.质点不受外力或所受合外力为零。
2.质点相对于惯性系保持静止或匀速直线运动。
你对它的了解,更深刻了吗?
原创文章,作者:小编,如若转载,请注明出处:http://www.ranqigaiguan.com/yhtg/3236.html